AV terminal of control of the UAV copes with problems of management. But there is a lack of flexibility and absence of information of behavior of the UAV in the information panel.
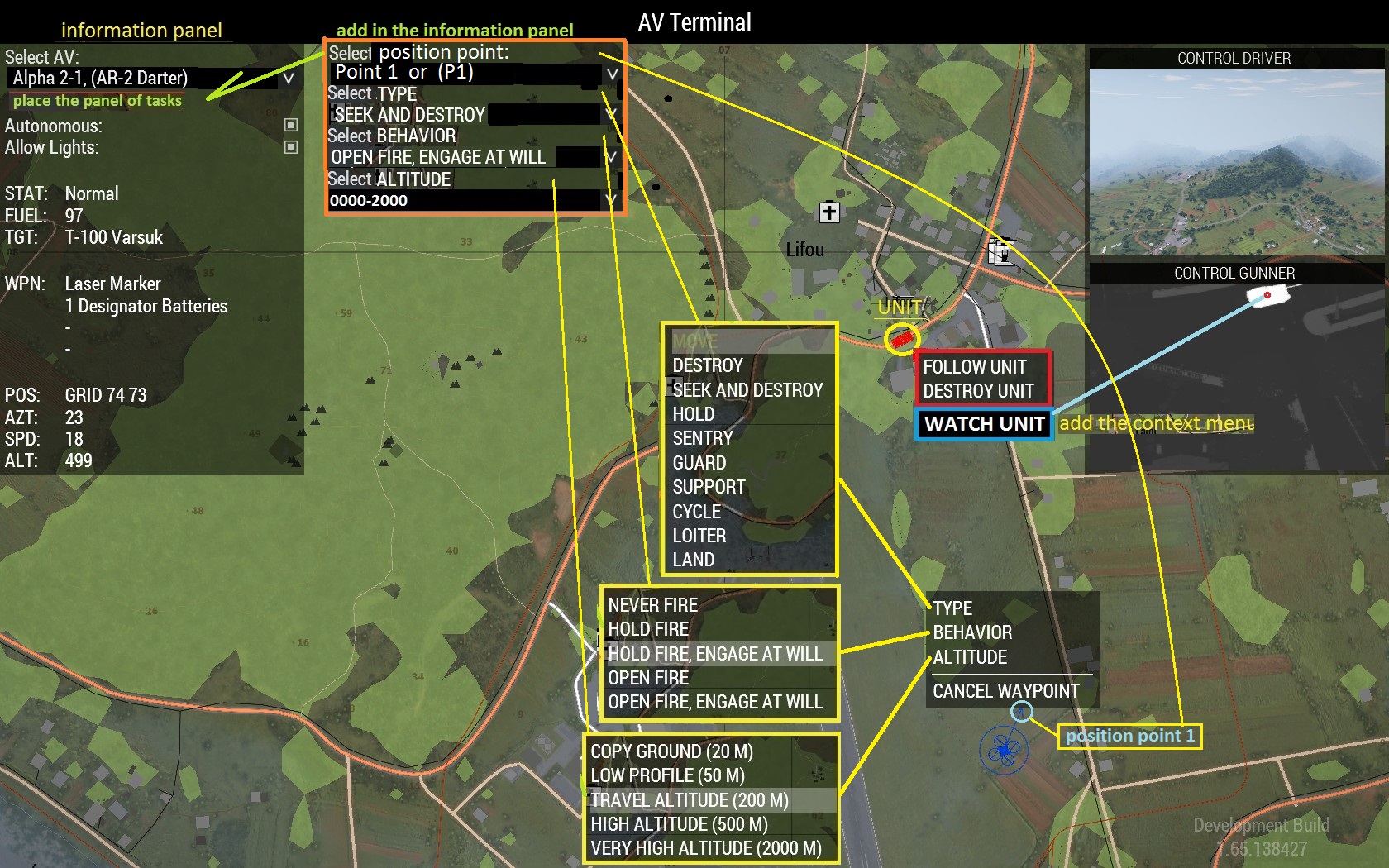
To place the most part of a context menu of management in the information panel (as shown in drawing).
In a context menu it is possible to leave only "follow unit", "destroy unit".
To add the context menu "watch unit" - visual maintenance of the purpose.
After connection of the terminal to the UAV, there is no access to options of behavior of the UAV. There is only a be disconnected menu.
When there is no a traveling point, there is no access to the menu of behavior the UAV. It isn't correct, I can't change behavior of the UAV when it already arrived to an appointment point, or before travel to a point.
https://youtu.be/WpjP-S8TYwU